Deep Reinforcement Learning algorithm for Pattern Recognition
Deep Reinforcement Learning algorithm





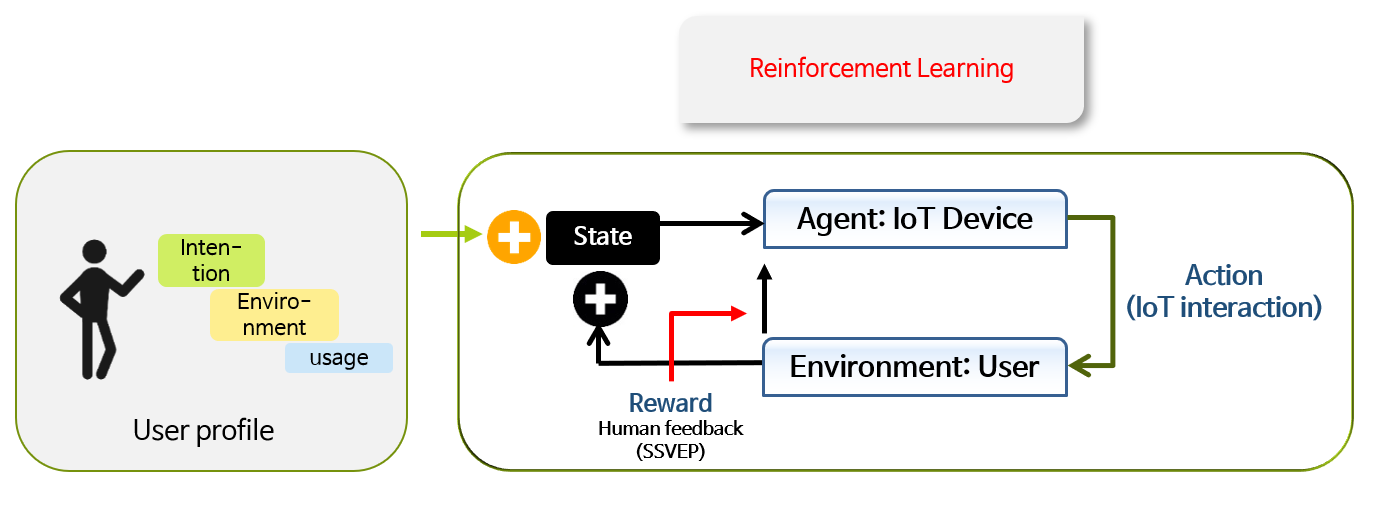
Reinforcement learning
Total structure

- The electromyography(EMG) signals were measured by Myo Arm band.
- Time domain features were extracted by various feature extraion algorithm.
- While agent is training, human’s feedback which is SSVEP were used as reward.
- Data sets were splited into training, test set, and 5-fold validation were used.
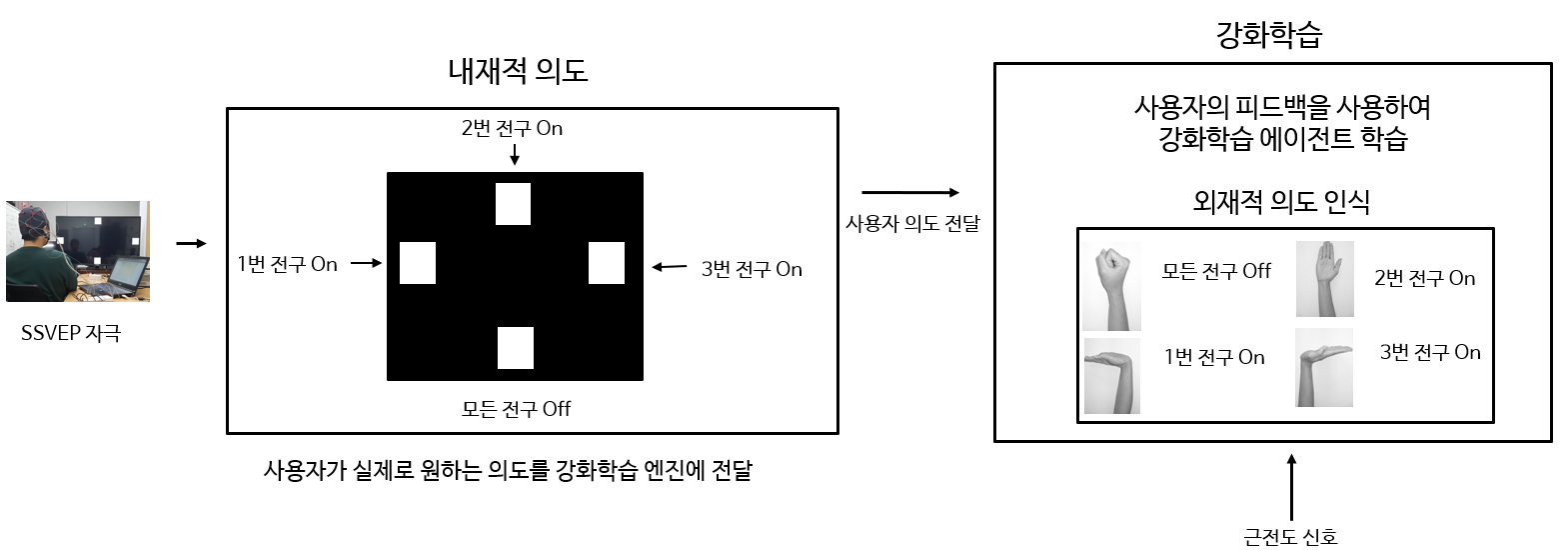
- Using SSVEP estimation, human can give the right answer to reinforcement learning agent
- Each Motion was mapped into phillips Hue smart light bulb.
- Human feedback put into replay memory.
Result

- RL agent predicts the human arm motion, and control the light bulb.
- If the control was wrong, SSVEP result will be used as a human feedback to train again the agent.
Deep Reinforcement Learning algorithm for Pattern Recognition
Introduction
- Conventional methods need the label(ground truth) to train the supervisd learning model. By utilizing the SSVEP(Steady State Visually Evoked Potential), it is possible to get a human feedback as a reward.
- By using human’s feedback, human arm motion pattern recognition accuracy will be increased.
- Reinforcement learning agent chooses the optimal features for human motion pattern recognition, and classifies the human motion patterns.
- The project aims to develop and distribute an open source Reinforcement learning Pattern recognition project and associated developer guide.
- It is working base on Myo-python library, Python 3.6, PyTorch .